नासाची मंगळ मोहीम -मार्स 2020(भाग सात )
नासाची मंगळ मोहीम -मार्स 2020
(भाग सातवा )
लेखक – राजीव पुजारी
विश्रामबाग, सांगली
नासाची मंगळ मोहीम -मार्स 2020
(भाग सातवा )
लेखक – राजीव पुजारी
विश्रामबाग, सांगली
फोन – 9527547629
मिशन स्पेस क्राफ्ट >पर्सिव्हीरन्स रोव्हर
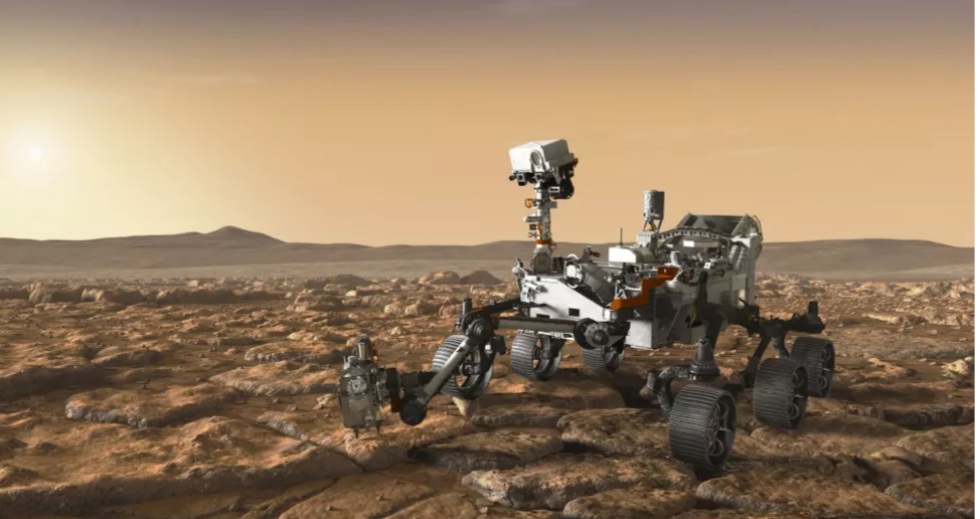
मंगळाकडे पाठवलेला पर्सिव्हीरन्स हा पाचवा रोव्हर आहे. यातील प्रत्येक रोव्हरने मंगळाच्या भूपृष्ठाचा अभ्यास करण्यासाठी कॅमेरे व इतर उपकरणे नेली आहेत. रोव्हर विवरांमध्ये विहार करू शकतात, चढ चढू शकतात, मातीच्या टेकड्या पार करू शकतात. त्यामुळे वैज्ञानिक व इंजिनिअर्सना ग्रहाचे अन्वेषण करता येते. इन्साईट किंवा फोनिक्स सारखे स्थिर लँडर्स ही कामे करू शकत नाहीत. नासाच्या सर्व रोव्हर्सची बांधणी नासाच्या जेट प्रॉपल्शन लॅब मध्ये झाली आहे.
(A)जड व जास्त सक्षम :-
कारच्या आकाराचा पर्सिव्हीरन्स रोव्हर 10 फूट लांब आहे (रोबोटिक आर्मची लांबी वगळून ), 9 फूट रुंद व सात फूट उंच आहे. पृथ्वीवर त्याचे वजन 1025 kg आहे.
मार्स 2020 मिशनचे पर्सिव्हीरन्स रोव्हर व इतर महत्वाचे भाग (जसे कि, क्रूझ स्टेज, डिसेंट स्टेज, मागील कवच व उष्णता अवरोधक कवच ) नासाच्या क्युरिऑसिटी रोव्हरच्या यशाच्या आधारावर बेतले आहेत. तर मग पर्सिव्हीरन्स क्युरिऑसिटीपेक्षा किती मोठा आहे? क्युरिऑसिटीपेक्षा पर्सिव्हीरन्सच्या चौकटीची (फ्रेमची) लांबी 3 सें.मी. आणि वजन 126 कि. ग्रॅ. जास्त आहे.
क्युरिऑसिटीच्या रोबोटिक आर्मची लांबी लांबवल्यावर 2 मीटर्स आहे आणि त्यावर 30 कि. ग्रॅ. वजनाचे टरेट बसवले आहे. टरेटवर वैज्ञानिक कॅमेरा, रासायनिक विश्लेषक आणि खडकांना भोक पाडणारे ड्रिल वगैरे उपकरणे बसवलेली आहेत. क्युरिऑसिटी प्रमाणेच पर्सिव्हीरन्सच्या रोबोटिक आर्मवर सुद्धा फिरणारे टरेट आहे. टरेटवर भोक पाडायचे ड्रिल, वैज्ञानिक उपकरणे व कॅमेरा बसवलेला आहे. क्युरिऑसिटी प्रमाणेच पर्सिव्हीरन्सच्या रोबोटिक आर्मची लांबी सुद्धा लांबवल्यावर 2 मीटर्सच आहे, पण त्याच्या टरेटचे वजन जास्त म्हणजे 45 कि. ग्रॅ. आहे. कारण त्यावरील उपकरणे मोठी आहेत आणि कोअरिंग करायचे असल्याने ड्रिल सुद्धा मोठे आहे. हे ड्रिल मशीन खडकाचा आजूबाजूचा भाग पोखरून खडूच्या आकाराचे तुकडे काढेल, हे तुकडे एका गुंतागुंतीच्या साठवणीच्या प्रणालीद्वारा नमुन्यांच्या नळ्यात ठेवले जातील. उलटपक्षी क्युरिऑसिटी नमुने तपासण्यासाठी खडकांचा भुगा करायचा.
नासाच्या पूर्वीच्या रोव्हर्स प्रमाणेच पर्सिव्हीरन्सचे डिझाईन सुद्धा रॉकर -बोगी पद्धतीचे आहे. त्यामुळे सर्व सहा चाकांवर समान भार पडतो आणि रोव्हर कलंडत नाही. या रोव्हरची चाके क्युरिऑसिटीपेक्षा जरा अरुंद व उंच आहेत पण क्युरिऑसिटीप्रमाणेच ती अल्युमिनियमच्या हलक्या मिश्र धातूंमधून मशिनिंग करून तयार केली आहेत. क्युरिऑसिटी व पर्सिव्हीरन्स दोघांच्या चाकांना ग्राऊजर्स आहेत, ते मंगळावरील वालुकामय प्रदेशासाठी खास डिझाईन केले आहेत. खडकांवर चढण्यासाठी क्युरिऑसिटीच्या चाकांवरील ग्राऊजर्स टोकदार शेव्हरॉनच्या पॅटर्न मध्ये होते, त्यामुळे चाकांची झीज जास्त झाली होती. उलटपक्षी पर्सिव्हीरन्सवरील ग्राऊजर्स किंचित बाक असलेले पण जवळजवळ सरळ म्हणण्याजोगे आहेत. प्रत्येक चाकावरील ट्रेड्सची संख्या 48 आहे (म्हणजे क्युरिऑसिटीच्या दुप्पट ) चाकावरील आवरण सुद्धा क्युरिऑसिटीपेक्षा दुप्पट जाडीचे आहे. टेस्टिंगच्यावेळी पर्सिव्हीरन्सच्या मोबिलिटी टीमला असे आढळून आले कि, यामुळे झिजण्याची क्रिया कमी झाली आहे आणि चाकांच्या खडक आणि वाळू यांवरील कामगिरीत सुधारणा झाली आहे.
(B) नमुने साठवणीची प्रणाली :-
पर्सिव्हीरन्स रोव्हरची नमुने गोळा करून ते साठवण्याची प्रणाली तीन रोबोंची आहे. ते एकोप्याने खडक व दगड धोंडे (धूळ, माती, खडकांचे तुटलेले तुकडे ) यांचे नमुने गोळा करतील, नमुने ठेवायच्या नळ्यांमध्ये हे नमुने बंदिस्त केले जातील आणि या नळ्या भविष्यकालीन मोहिमांद्वारे पृथ्वीवर आणण्यासाठी मंगळाच्या भूमीवर ठेवल्या जातील.
या प्रणालीतील रोबो खालीलप्रमाणे
(i) यांत्रिक हात – नमुने साठविण्याच्या प्रणालीमध्ये गुंतलेला पहिला रोबो म्हणजे ड्रिल मशीन व इतर उपकरणांनी सुसज्ज असा दोन मीटर्स लांबीचा रोबोटिक हात होय. पाच सांधे असलेला हा हात रोव्हरच्या चेसिसला पुढील बाजूस बसवला आहे आणि तो मंगळभूमीवरील इच्छित स्थळाच्या अगदी जवळ टरेट नेता येईल अशा प्रमाणे हलवता येतो. टरेटवर कोअरिंग ड्रिल आणि खडक व दगडधोंडे यांचे नमुने गोळा करणारे फिरणारे उपकरण बसवले आहे. अपेक्षित लक्षाचे अल्ट्राव्हायोलेट रमण स्पेक्ट्रोमीटर (शेरलॉक ) व एक्स -रे फ्ल्युरोसन्स स्पेक्ट्रोमीटर (पिक्सेल ) यांनी परीक्षण करण्यापूर्वी त्यावरील धूळ व रेती उडवण्यासाठी उच्च दाबाच्या नैट्रोजनाने भरलेली लहान टाकी वापरलेली आहे.
जर पर्सिव्हीरन्सच्या टीमला असे वाटले कि, खडक आणि दगडधोंडे यांचे नमुने तपासण्याजोगे आहेत, तर इंजिनिअर्स रोबोटिक आर्मला आज्ञा देतील कि, ‘ आत सॅम्पल ट्यूब असलेले कोअरिंग अथवा रेगोलिथ बिट कोअरिंग टूल मध्ये ठेव आणि ड्रिल बिट मंगळभूमीवरील अपेक्षित लक्ष्यावर ठेव ‘ जेव्हा खडकाचा गाभा काढायचा असतो तेव्हा, ड्रिल मशीन फिरत्या मोडवर (जेव्हा कॉन्स्टन्ट प्रेशर वापरून ड्रिल बीटने भोक पाडायचे असते ) किंवा परक्युझिव्ह मोडवर (जेव्हा ड्रिल बीट पुढे जावे म्हणून ड्रिलला गोल फिरण्याबरोबरच हातोडीसारखे ठोके दिले जातात ) ठेवून 13 मि.मि. व्यासाचे व 60 मि.मि. लांबीचे नमुने बीटच्या मध्यभागी असलेल्या सॅम्पल ट्यूबमध्ये गोळा केले जातात. या नमुन्याचे सरासरी वजन 10 ते 15 ग्रॅम असणार आहे. रेगोलीथ बिटद्वारा दगडधोंड्यांचे नमुनेदेखील सॅम्पलट्यूबमध्ये गोळा केले जातील.
(ii) बिट्स असलेला फिरता पट्टा :- सॅम्पल गोळा केल्यावर रोबोटिक आर्म या ट्यूब्स सॅम्पल कॅशिंग सिस्टीमच्या दुसऱ्या रोबोच्या हवाली करतील, हा रोबो म्हणजे बिट्स असलेला फिरता पट्टा(बिट कोरोझल ).
लहान उडत्या तबकडी दिसणारा हा बीट कोरोझल रोव्हरच्या पुढच्या बाजूस अंत:स्थापित केलेला आहे. यामध्ये रिकाम्या ड्रिलबीट्स असतात व तो त्या टरेटवरील कोअररला पुरवतो. कोअररने नमुना घेतल्यावर बीट कोरोझल सॅम्पलने भरलेली नळी असलेले बीट कोअरर पासून घेऊन रोव्हरच्या पोटात नेतो. रोव्हरच्या आत ही भरलेली नळी सॅम्पल कॅशिंग प्रणालीच्या तिसऱ्या रोबोकडे सोपवली जाते, ज्याला अडॅप्टीव्ह कॅशिंग सिस्टीम म्हणतात.
(iii) अडॅप्टीव्ह कॅशिंग असेम्ब्ली :-
सॅम्पल हॅण्डलिंग आर्म, सॅम्पल ट्यूब असेम्ब्लीज, ट्यूब सील्स अणि विविध कामांची स्टेशन्स या सर्वांनी मिळून अडॅप्टीव्ह कॅशिंग असेम्ब्ली बनते. जेव्हा बीट कोरोझल सॅम्पलने भरलेली ट्यूब अडॅप्टीव्ह कॅशिंग असेम्ब्लीच्या हवाली करतो, तेव्हा अर्ध्या मिटर लांबीचा सॅम्पल हॅण्डलिंग आर्म त्या ट्यूब्जना प्रोसेसिंग स्टेशन्सकडे पाठवतो. त्या स्टेशन्सवर सॅम्पलचे आकारमान मोजले जाते, त्याची प्रतिमा घेतली जाते, ट्यूबचे सील बसवले जाते आणि ट्यूबला स्टोअरेजमध्ये ठेवले जाते. नंतर रोव्हर जेव्हा योग्य त्या ठिकाणी पोचतो तेव्हा सॅम्पल हँडलिंग आर्म त्या ट्युब्जना बाहेर काढतो व मंगळाच्या पृष्ठभागावर सोडतो. या ट्यूब्स भविष्यकालीन मोहीमेद्वारा पृथ्वीवर आणून त्यांचे परीक्षण केले जाणार आहे.
या कामांव्यतिरिक्त सॅम्पल कॅशिंग प्रणाली अभूतपूर्व अशी जीवशास्त्रीय स्वच्छता कायम ठेवते आणि पृथ्वीपासून चुकून आलेल्या घाणीपासून सॅम्पल्सचे संरक्षण करते. अभूतपूर्व अशी जीवशास्त्रीय स्वच्छता कायम ठेवणे व पृथ्वीपासून चुकून आलेल्या घाणीपासून सॅम्पल्सचे संरक्षण करणे या दोन घटकांच्या एकत्रीकरणामुळे ही प्राणली मंगळासाठी तयार केलेल्या आतापर्यंतच्या प्रणालींपेक्षा अधिक गुंतागुंतीची ठरते.
(C) मंगळाला पाहणे व ऐकणे :-
इतिहासातील आतापर्यंतच्या दोन ग्रहांदरम्यानच्या अंतराळ मोहिमांपेक्षा मार्स 2020 वर जास्त कॅमेरे आहेत. फक्त पर्सिव्हीरन्सवर 19 कॅमेरे आहेत. ते मंगळाच्या भूपृष्ठाच्या सुंदर प्रतिमा सर्व बारकाव्यांनिशी पाठवेल. या कॅमेरांपैकी तंत्रज्ञानासाठी 9, प्रवेश, अवरोह व अवतरणासाठी (एन्ट्री, डिसेंट व लँडिंग ) 3 आणि वैज्ञानिक संशोधनासाठी 7 कॅमेरे आहेत. प्रवेश,अवरोह व अवतरणासाठी एरोशेल व डिसेंट स्टेजवरपण कॅमेरे आहेत.
पर्सिव्हीरन्स रोव्हरवर दोन मायक्रोफोन आहेत. त्यातील एक नंतरच्या तंत्रज्ञानविषयक विश्लेषणासाठी व लोकांना मोहिमेशी जोडण्यासाठी आणि दुसरा सुपरकॅम या वैज्ञानिक उपकरणाचा भाग आहे.
(D) तुमचे नांव मंगळाकडे जात आहे:- आणखी एक विशेष गोष्ट रोव्हरच्या मागच्या बाजूच्या आडव्या तुळईवर (क्रॉस बीम ) दिसेल, ती म्हणजे जगभरातील सुमारे 10.9 दशलक्ष लोकांची नावे कोरलेल्या सिलिकॉनच्या तीन चकत्या. या लोकांनी मे ते सप्टेंबर 2019 दरम्यान नासाने चालवलेल्या ‘ मंगळावर तुमचे नांव पाठवा ‘ या मोहिमेत भाग घेतला होता. सांगायला आनंद वाटतो कि,माझे नांव पण या पट्टीवर आहे. हातांच्या नखाच्या आकाराएव्हढ्या या चकत्यांवर ‘रोव्हरचे बारसे करा ‘ या मोहिमेत भाग घेतलेल्या अनेक लोकांपैकी अंतिम फेरीत पोचलेल्या 155 व्यक्तींचे निबंध देखील कोरले आहेत.
क्रॉस बीमवर या चकत्यांव्यतिरिक्त लेसरने कोरलेले एक चित्र आहे. यात डाव्या बाजूला पृथ्वीचा गोलक दाखविला आहे, उजव्या बाजूला मंगळाचा गोलक दाखवला आहे व मध्यभागी या दोन्ही गोलकांना जोडणारा एक तारा (आपला सूर्य ) दाखवला आहे व तो दोन्ही ग्रहांना प्रकाश देतो असे दर्शविले आहे आणि सूर्यकिरणांमध्ये मोर्स कोडमध्ये ‘ एकत्र येऊन अन्वेषण करूया ‘ असा संदेश आहे.
नासाने लोकांना मोहिमेशी जोडले आहे:- या मोहिमेशी लोकांना जोडण्यासाठी नासाने अनेक उपक्रम राबवले आहेत. त्यातील कांही खालील प्रमाणे :
(i) नासाने सर्वसामान्य लोकांसाठी मोहिमेची माहिती देणाऱ्या तीन कार्यशाळा ऑनलाईन आयोजित केल्या होत्या व भाग घेतलेल्या लोकांना प्रशस्तीपत्रक दिले आहे. लेखकाने या तिन्ही कार्यशाळांमध्ये पहाटे तीन वाजता उठून भाग घेतला होता.
(ii) विध्यार्थ्यांसाठी या मोहिमेशी निगडित विविध मॉडेल्स बनवण्याचा उपक्रम ठेवला होता.
(iii)नासाने असे एक सॉफ्टवेअर केले होते, ज्यामध्ये तुम्ही तुमचा फोटो अपलोड करायचा होता, या सॉफ्टवेअरमुळे व्हर्च्युअली तुम्ही JPL च्या असेम्ब्ली रूममध्ये, मंगळावर किंवा अग्निबाणाबरोबर उभे आहात असा फोटो आपणास लगेचच मिळत होता.
फोन – 9527547629
मिशन स्पेस क्राफ्ट >पर्सिव्हीरन्स रोव्हर
मंगळाकडे पाठवलेला पर्सिव्हीरन्स हा पाचवा रोव्हर आहे. यातील प्रत्येक रोव्हरने मंगळाच्या भूपृष्ठाचा अभ्यास करण्यासाठी कॅमेरे व इतर उपकरणे नेली आहेत. रोव्हर विवरांमध्ये विहार करू शकतात, चढ चढू शकतात, मातीच्या टेकड्या पार करू शकतात. त्यामुळे वैज्ञानिक व इंजिनिअर्सना ग्रहाचे अन्वेषण करता येते. इन्साईट किंवा फोनिक्स सारखे स्थिर लँडर्स ही कामे करू शकत नाहीत. नासाच्या सर्व रोव्हर्सची बांधणी नासाच्या जेट प्रॉपल्शन लॅब मध्ये झाली आहे.
(A)जड व जास्त सक्षम :-
कारच्या आकाराचा पर्सिव्हीरन्स रोव्हर 10 फूट लांब आहे (रोबोटिक आर्मची लांबी वगळून ), 9 फूट रुंद व सात फूट उंच आहे. पृथ्वीवर त्याचे वजन 1025 kg आहे.
मार्स 2020 मिशनचे पर्सिव्हीरन्स रोव्हर व इतर महत्वाचे भाग (जसे कि, क्रूझ स्टेज, डिसेंट स्टेज, मागील कवच व उष्णता अवरोधक कवच ) नासाच्या क्युरिऑसिटी रोव्हरच्या यशाच्या आधारावर बेतले आहेत. तर मग पर्सिव्हीरन्स क्युरिऑसिटीपेक्षा किती मोठा आहे? क्युरिऑसिटीपेक्षा पर्सिव्हीरन्सच्या चौकटीची (फ्रेमची) लांबी 3 सें.मी. आणि वजन 126 कि. ग्रॅ. जास्त आहे.
क्युरिऑसिटीच्या रोबोटिक आर्मची लांबी लांबवल्यावर 2 मीटर्स आहे आणि त्यावर 30 कि. ग्रॅ. वजनाचे टरेट बसवले आहे. टरेटवर वैज्ञानिक कॅमेरा, रासायनिक विश्लेषक आणि खडकांना भोक पाडणारे ड्रिल वगैरे उपकरणे बसवलेली आहेत. क्युरिऑसिटी प्रमाणेच पर्सिव्हीरन्सच्या रोबोटिक आर्मवर सुद्धा फिरणारे टरेट आहे. टरेटवर भोक पाडायचे ड्रिल, वैज्ञानिक उपकरणे व कॅमेरा बसवलेला आहे. क्युरिऑसिटी प्रमाणेच पर्सिव्हीरन्सच्या रोबोटिक आर्मची लांबी सुद्धा लांबवल्यावर 2 मीटर्सच आहे, पण त्याच्या टरेटचे वजन जास्त म्हणजे 45 कि. ग्रॅ. आहे. कारण त्यावरील उपकरणे मोठी आहेत आणि कोअरिंग करायचे असल्याने ड्रिल सुद्धा मोठे आहे. हे ड्रिल मशीन खडकाचा आजूबाजूचा भाग पोखरून खडूच्या आकाराचे तुकडे काढेल, हे तुकडे एका गुंतागुंतीच्या साठवणीच्या प्रणालीद्वारा नमुन्यांच्या नळ्यात ठेवले जातील. उलटपक्षी क्युरिऑसिटी नमुने तपासण्यासाठी खडकांचा भुगा करायचा.
नासाच्या पूर्वीच्या रोव्हर्स प्रमाणेच पर्सिव्हीरन्सचे डिझाईन सुद्धा रॉकर -बोगी पद्धतीचे आहे. त्यामुळे सर्व सहा चाकांवर समान भार पडतो आणि रोव्हर कलंडत नाही. या रोव्हरची चाके क्युरिऑसिटीपेक्षा जरा अरुंद व उंच आहेत पण क्युरिऑसिटीप्रमाणेच ती अल्युमिनियमच्या हलक्या मिश्र धातूंमधून मशिनिंग करून तयार केली आहेत. क्युरिऑसिटी व पर्सिव्हीरन्स दोघांच्या चाकांना ग्राऊजर्स आहेत, ते मंगळावरील वालुकामय प्रदेशासाठी खास डिझाईन केले आहेत. खडकांवर चढण्यासाठी क्युरिऑसिटीच्या चाकांवरील ग्राऊजर्स टोकदार शेव्हरॉनच्या पॅटर्न मध्ये होते, त्यामुळे चाकांची झीज जास्त झाली होती. उलटपक्षी पर्सिव्हीरन्सवरील ग्राऊजर्स किंचित बाक असलेले पण जवळजवळ सरळ म्हणण्याजोगे आहेत. प्रत्येक चाकावरील ट्रेड्सची संख्या 48 आहे (म्हणजे क्युरिऑसिटीच्या दुप्पट ) चाकावरील आवरण सुद्धा क्युरिऑसिटीपेक्षा दुप्पट जाडीचे आहे. टेस्टिंगच्यावेळी पर्सिव्हीरन्सच्या मोबिलिटी टीमला असे आढळून आले कि, यामुळे झिजण्याची क्रिया कमी झाली आहे आणि चाकांच्या खडक आणि वाळू यांवरील कामगिरीत सुधारणा झाली आहे.
(B) नमुने साठवणीची प्रणाली :-
पर्सिव्हीरन्स रोव्हरची नमुने गोळा करून ते साठवण्याची प्रणाली तीन रोबोंची आहे. ते एकोप्याने खडक व दगड धोंडे (धूळ, माती, खडकांचे तुटलेले तुकडे ) यांचे नमुने गोळा करतील, नमुने ठेवायच्या नळ्यांमध्ये हे नमुने बंदिस्त केले जातील आणि या नळ्या भविष्यकालीन मोहिमांद्वारे पृथ्वीवर आणण्यासाठी मंगळाच्या भूमीवर ठेवल्या जातील.
या प्रणालीतील रोबो खालीलप्रमाणे
(i) यांत्रिक हात – नमुने साठविण्याच्या प्रणालीमध्ये गुंतलेला पहिला रोबो म्हणजे ड्रिल मशीन व इतर उपकरणांनी सुसज्ज असा दोन मीटर्स लांबीचा रोबोटिक हात होय. पाच सांधे असलेला हा हात रोव्हरच्या चेसिसला पुढील बाजूस बसवला आहे आणि तो मंगळभूमीवरील इच्छित स्थळाच्या अगदी जवळ टरेट नेता येईल अशा प्रमाणे हलवता येतो. टरेटवर कोअरिंग ड्रिल आणि खडक व दगडधोंडे यांचे नमुने गोळा करणारे फिरणारे उपकरण बसवले आहे. अपेक्षित लक्षाचे अल्ट्राव्हायोलेट रमण स्पेक्ट्रोमीटर (शेरलॉक ) व एक्स -रे फ्ल्युरोसन्स स्पेक्ट्रोमीटर (पिक्सेल ) यांनी परीक्षण करण्यापूर्वी त्यावरील धूळ व रेती उडवण्यासाठी उच्च दाबाच्या नैट्रोजनाने भरलेली लहान टाकी वापरलेली आहे.
जर पर्सिव्हीरन्सच्या टीमला असे वाटले कि, खडक आणि दगडधोंडे यांचे नमुने तपासण्याजोगे आहेत, तर इंजिनिअर्स रोबोटिक आर्मला आज्ञा देतील कि, ‘ आत सॅम्पल ट्यूब असलेले कोअरिंग अथवा रेगोलिथ बिट कोअरिंग टूल मध्ये ठेव आणि ड्रिल बिट मंगळभूमीवरील अपेक्षित लक्ष्यावर ठेव ‘ जेव्हा खडकाचा गाभा काढायचा असतो तेव्हा, ड्रिल मशीन फिरत्या मोडवर (जेव्हा कॉन्स्टन्ट प्रेशर वापरून ड्रिल बीटने भोक पाडायचे असते ) किंवा परक्युझिव्ह मोडवर (जेव्हा ड्रिल बीट पुढे जावे म्हणून ड्रिलला गोल फिरण्याबरोबरच हातोडीसारखे ठोके दिले जातात ) ठेवून 13 मि.मि. व्यासाचे व 60 मि.मि. लांबीचे नमुने बीटच्या मध्यभागी असलेल्या सॅम्पल ट्यूबमध्ये गोळा केले जातात. या नमुन्याचे सरासरी वजन 10 ते 15 ग्रॅम असणार आहे. रेगोलीथ बिटद्वारा दगडधोंड्यांचे नमुनेदेखील सॅम्पलट्यूबमध्ये गोळा केले जातील.
(ii) बिट्स असलेला फिरता पट्टा :- सॅम्पल गोळा केल्यावर रोबोटिक आर्म या ट्यूब्स सॅम्पल कॅशिंग सिस्टीमच्या दुसऱ्या रोबोच्या हवाली करतील, हा रोबो म्हणजे बिट्स असलेला फिरता पट्टा(बिट कोरोझल ).
लहान उडत्या तबकडी दिसणारा हा बीट कोरोझल रोव्हरच्या पुढच्या बाजूस अंत:स्थापित केलेला आहे. यामध्ये रिकाम्या ड्रिलबीट्स असतात व तो त्या टरेटवरील कोअररला पुरवतो. कोअररने नमुना घेतल्यावर बीट कोरोझल सॅम्पलने भरलेली नळी असलेले बीट कोअरर पासून घेऊन रोव्हरच्या पोटात नेतो. रोव्हरच्या आत ही भरलेली नळी सॅम्पल कॅशिंग प्रणालीच्या तिसऱ्या रोबोकडे सोपवली जाते, ज्याला अडॅप्टीव्ह कॅशिंग सिस्टीम म्हणतात.
(iii) अडॅप्टीव्ह कॅशिंग असेम्ब्ली :-
सॅम्पल हॅण्डलिंग आर्म, सॅम्पल ट्यूब असेम्ब्लीज, ट्यूब सील्स अणि विविध कामांची स्टेशन्स या सर्वांनी मिळून अडॅप्टीव्ह कॅशिंग असेम्ब्ली बनते. जेव्हा बीट कोरोझल सॅम्पलने भरलेली ट्यूब अडॅप्टीव्ह कॅशिंग असेम्ब्लीच्या हवाली करतो, तेव्हा अर्ध्या मिटर लांबीचा सॅम्पल हॅण्डलिंग आर्म त्या ट्यूब्जना प्रोसेसिंग स्टेशन्सकडे पाठवतो. त्या स्टेशन्सवर सॅम्पलचे आकारमान मोजले जाते, त्याची प्रतिमा घेतली जाते, ट्यूबचे सील बसवले जाते आणि ट्यूबला स्टोअरेजमध्ये ठेवले जाते. नंतर रोव्हर जेव्हा योग्य त्या ठिकाणी पोचतो तेव्हा सॅम्पल हँडलिंग आर्म त्या ट्युब्जना बाहेर काढतो व मंगळाच्या पृष्ठभागावर सोडतो. या ट्यूब्स भविष्यकालीन मोहीमेद्वारा पृथ्वीवर आणून त्यांचे परीक्षण केले जाणार आहे.
या कामांव्यतिरिक्त सॅम्पल कॅशिंग प्रणाली अभूतपूर्व अशी जीवशास्त्रीय स्वच्छता कायम ठेवते आणि पृथ्वीपासून चुकून आलेल्या घाणीपासून सॅम्पल्सचे संरक्षण करते. अभूतपूर्व अशी जीवशास्त्रीय स्वच्छता कायम ठेवणे व पृथ्वीपासून चुकून आलेल्या घाणीपासून सॅम्पल्सचे संरक्षण करणे या दोन घटकांच्या एकत्रीकरणामुळे ही प्राणली मंगळासाठी तयार केलेल्या आतापर्यंतच्या प्रणालींपेक्षा अधिक गुंतागुंतीची ठरते.
(C) मंगळाला पाहणे व ऐकणे :-
इतिहासातील आतापर्यंतच्या दोन ग्रहांदरम्यानच्या अंतराळ मोहिमांपेक्षा मार्स 2020 वर जास्त कॅमेरे आहेत. फक्त पर्सिव्हीरन्सवर 19 कॅमेरे आहेत. ते मंगळाच्या भूपृष्ठाच्या सुंदर प्रतिमा सर्व बारकाव्यांनिशी पाठवेल. या कॅमेरांपैकी तंत्रज्ञानासाठी 9, प्रवेश, अवरोह व अवतरणासाठी (एन्ट्री, डिसेंट व लँडिंग ) 3 आणि वैज्ञानिक संशोधनासाठी 7 कॅमेरे आहेत. प्रवेश,अवरोह व अवतरणासाठी एरोशेल व डिसेंट स्टेजवरपण कॅमेरे आहेत.
पर्सिव्हीरन्स रोव्हरवर दोन मायक्रोफोन आहेत. त्यातील एक नंतरच्या तंत्रज्ञानविषयक विश्लेषणासाठी व लोकांना मोहिमेशी जोडण्यासाठी आणि दुसरा सुपरकॅम या वैज्ञानिक उपकरणाचा भाग आहे.
(D) तुमचे नांव मंगळाकडे जात आहे:- आणखी एक विशेष गोष्ट रोव्हरच्या मागच्या बाजूच्या आडव्या तुळईवर (क्रॉस बीम ) दिसेल, ती म्हणजे जगभरातील सुमारे 10.9 दशलक्ष लोकांची नावे कोरलेल्या सिलिकॉनच्या तीन चकत्या. या लोकांनी मे ते सप्टेंबर 2019 दरम्यान नासाने चालवलेल्या ‘ मंगळावर तुमचे नांव पाठवा ‘ या मोहिमेत भाग घेतला होता. सांगायला आनंद वाटतो कि,माझे नांव पण या पट्टीवर आहे. हातांच्या नखाच्या आकाराएव्हढ्या या चकत्यांवर ‘रोव्हरचे बारसे करा ‘ या मोहिमेत भाग घेतलेल्या अनेक लोकांपैकी अंतिम फेरीत पोचलेल्या 155 व्यक्तींचे निबंध देखील कोरले आहेत.
क्रॉस बीमवर या चकत्यांव्यतिरिक्त लेसरने कोरलेले एक चित्र आहे. यात डाव्या बाजूला पृथ्वीचा गोलक दाखविला आहे, उजव्या बाजूला मंगळाचा गोलक दाखवला आहे व मध्यभागी या दोन्ही गोलकांना जोडणारा एक तारा (आपला सूर्य ) दाखवला आहे व तो दोन्ही ग्रहांना प्रकाश देतो असे दर्शविले आहे आणि सूर्यकिरणांमध्ये मोर्स कोडमध्ये ‘ एकत्र येऊन अन्वेषण करूया ‘ असा संदेश आहे.
नासाने लोकांना मोहिमेशी जोडले आहे:- या मोहिमेशी लोकांना जोडण्यासाठी नासाने अनेक उपक्रम राबवले आहेत. त्यातील कांही खालील प्रमाणे :
(i) नासाने सर्वसामान्य लोकांसाठी मोहिमेची माहिती देणाऱ्या तीन कार्यशाळा ऑनलाईन आयोजित केल्या होत्या व भाग घेतलेल्या लोकांना प्रशस्तीपत्रक दिले आहे. लेखकाने या तिन्ही कार्यशाळांमध्ये पहाटे तीन वाजता उठून भाग घेतला होता.
(ii) विध्यार्थ्यांसाठी या मोहिमेशी निगडित विविध मॉडेल्स बनवण्याचा उपक्रम ठेवला होता.
(iii)नासाने असे एक सॉफ्टवेअर केले होते, ज्यामध्ये तुम्ही तुमचा फोटो अपलोड करायचा होता, या सॉफ्टवेअरमुळे व्हर्च्युअली तुम्ही JPL च्या असेम्ब्ली रूममध्ये, मंगळावर किंवा अग्निबाणाबरोबर उभे आहात असा फोटो आपणास लगेचच मिळत होता.
शेअर करा..